·
De
forma semelhante ao exemplo de acesso direto
ao hardware, a solucao utilizada no caso da aplicacao para controle do
braco
robo foi a criacao de um usuario especial pertencente ao grupo uucp,
e a
execucao dos programas para acesso a serial (ao braco robo) realizada
por esse
usuario.
·
No
programa anterior, nas linhas 46 e 47 estao
listados os nomes dos arquivos que identificam as portas seriais com1 a
com 4
no Linux. Esses nomes substituem os antigos /dev/cua0 a /dev/cua3.
·
Uma
das portas (1, 2, 3 ou 4) e aberta na linha
64, de acordo com a selecao do usuario. O flag O_RDWR faz com
que a
porta seja aberta para entrada e saida. O flag O_NOCTTY garante
que o
programa nao sera o “terminal em controle” da porta. Se esse flag nao
for
utilizado, outras entradas de dados (ex. ^C enviado pelo teclado) pode
afetar o
programa. O flag O_NDELAY avisa ao Linux que o programa ira
ignorar o
sinal DCD da RS-
·
A
funcao fcntl na linha 68 e utilizada
para configurar a porta serial para possiveis operacoes de leitura. O
flag
F_SETFL e utilizado em conjunto com o terceiro argumento para ativar ou
desativar o modo de leitura da porta. Ao se utilizar 0 como terceiro
argumento
na funcao fcntl, uma operacao de leitura na porta serial (read)
ira bloquear a execucao do programa ate que um carcter seja recebido,
um
intervalo de tempo expire, ou um erro ocorra. Para realizar leituras
nao
bloqueantes na serial, utlizar o flag FNDELAY, no lugar do 0.
·
A
funcao tcgetattr na linha 75 e
utilizada para ler os parametros associados ao descritor de arquivo fd
(no caso
a porta serial aberta), e armazena-los na variavel options.
Esses dados
correspondem ao status atual da porta serial.
·
Logo
a seguir, na linha
·
Nas
linhas seguintes os demais parametros para
a comunicacao serial sao armazenados no registro options. A
porta serial
do braco robo esta configurada para comunicacao a 9600 bps, com 8 bits
de
dados, 1 stop bit e sem paridade.
·
A
funcao tcsetattr na linha 97 realiza a
escrita do registro options, programando assim a UART do
computador
pessoal de acordo com os dados do protocolo estabelecido pelo circuito
do braco
robo.
·
O
envio de comandos para o braco robo e
realizado na linha 118 por intermedio da funcao write que envia
o
comando a ser realizado, utilizando para isso o descritor do arquivo
aberto na
linha
·
Notar
o uso do flag FNDELAY na funcao fcntl (linha
122) para configurar a operacao de leitura nao-bloqueante do status da
serial.
Esse flag faz com que a funcao read retorne 0, caso nao existam
dados
disponiveis para serem lidos na porta serial.
·
A
seguir sao apresentados programas para acesso
a porta paralela. Caso os programas nao consigam escrever/ler o dado
desejado
na porta, verificar as possiveis causas:
o
Escrita
no endereco errado (378H equivale a 888
em decimal).
o
O
cabo/conectores podem estar ligados de forma
incorreta. Verificar!
o
O
dispositivo conectado a porta esta causando o
problema. Desconectar o dispositivo, e medir os bits da porta para ver
se eles
estao sendo alterados corretamente pelo programa no computador pessoal.
o
Os
bits 0, 1 e 3 no registrador de controle das
portas sao invertidos entre o registrador e o conector. Ao se escrever
no
registrador de controle, esses bits apareceram nos pinos do conector
com
valores invertidos em relacao aos escritos.
o
A
porta suporta modo PS/2 e foi escrito 1 no
bit 5 do registrador de controle. Isso desabilita a porta para saida de
dados.
Escrever 0 no bit 5 do registrador de controle para habilitar a saida.
o
Um
driver de baixo-nivel do Windows esta
proibindo o acesso a porta.
·
Caso
o valor lido da porta nao e o esperado
verificar, alem dos itens acima:
o
Os
bits 0, 1 e 3 no registrador de controle das
portas, e o bit 7 do registrador de status sao invertidos entre o
conector e os
respectivos registradores. Ao se ler desses registradores, os bits
mencionados
possuirao valores invertidos em relacao aos existentes nos pinos do
conector.
o
A
porta nao aceita o modo PS/2 e nao e possivel
desabilitar o modo de saida (unidirecional). O valor lido sera sempre o
ultimo
valor escrito.
o
A
porta suporta o modo PS/2, mas o bit 5 do
registrador de controle nao foi setado para 1 de forma a desabilitar o
modo de
saida da porta. Escrever 1 nesse bit de forma a habilitar a leitura nos
pinos
de dados da porta.
Porta Serial RS-
Acesso via API – commapi
linguagem
Java – Win32 e Solaris
·
A commapi
e uma API que pode ser
utilizada por desenvolvedores em programas em Java para acesso as
portas de
entrada e saida (paralela e serial). Os arquivos dessa API podem ser
obtidos na
pagina do curso (ver Exercicio 3 da aula pratica), e tambem dicas de
instalacao
e utilizacao.
·
Para
instalar a commapi no Windows e
preciso ter permissao de escrita no diretorio onde o jdk esta
instalado. Para
realizar a instalacao executar os seguintes passos (<jdk> e o
caminho
onde o jdk esta instalado):
o
Copiar
o arquivo win32com.dll para o
diretorio <jdk>\jre\bin
o
Copiar
o arquivo comm.jar para o
diretorio <jdk>\jre\lib\ext
o
Copiar
o arquivo javax.comm.properties para
o diretorio <jdk>\jre\lib
·
Uma
dica extra e a execucao da aplicacao
utilizando a virtual machine (java) que se encontra no mesmo
diretorio
do arquivo win32com.dll (<jdk>\jre\bin). O ambiente pode
estar
configurado para ser utilizado outro java, e nesse caso o programa nao
funcionara corretamente.
·
A
melhor forma de entender o funcionamento
dessa API e por meio do estudo das aplicacoes exemplo que acompanham os
arquivos. Um bom ponto de partida e a aplicacao “Serial Demo”. O
arquivo README
que acompanha essa aplicacao contem dicas de compilacao e utilizacao.
·
Na
classe SerialConnection da
aplicacao SerialDemo, observar:
o
O
metodo openConnection(), na linha 90,
abre uma porta serial.
o
O
metodo closeConnection(), na linha
203, fecha uma porta serial liberando a mesma para uso por outra
aplicacao.
o
O
metodo setConnectionParameters(), na
linha 167, utilizado para configurar (programar) a porta serial com os
parametros fornecidos pelo usuario.
o
O
metodo serialEvent(), na linha 255,
utilizado para avisar a aplicacao sobre a chegada de dados na porta
serial, e
recepcao desses dados.
o
O
metodo keyTyped(), na linha 330,
utilizado para envio de dados para a porta serial. Cada caracter
digitado na
caixa de texto e enviado automaticamente para a porta serial aberta.
Porta Serial RS-
Acesso em Java via Java Native Interface (JNI)
linguagens
Java, C++ – Win32 e Linux
Sockets
Acesso a dispositivo conectado a outro computador da rede
linguagem
Java – Win32, Linux
Internet
Acesso usando browser com dispositivo conectado a
outro computador na Internet
linguagens
HTML, Java, Servlet, C++ – J2EE, Win32 e Linux
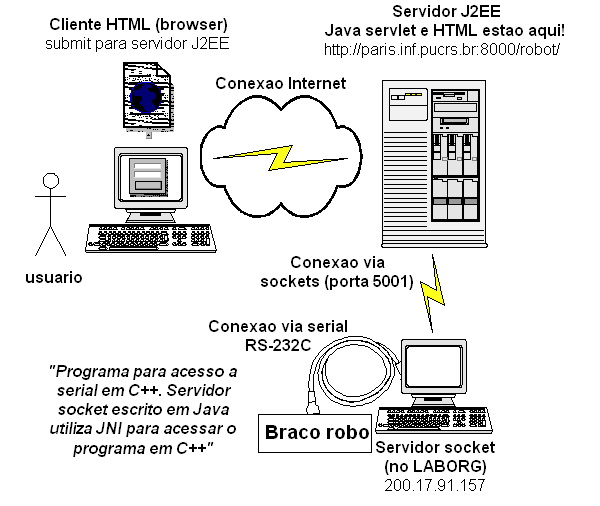
·
As
tres formas de acesso acima sao demonstradas
com o auxilio da aplicacao WebRobot. Essa aplicacao utiliza esses tres
conceitos, conforme mostrado no diagrama a seguir.
·
Todos
os fontes que compoem essa aplicacao
estao disponiveis para download em:
http://www.inf.pucrs.br/~eduardob/disciplinas/extensao/Robot/WebRobot/
·
Os
seguintes diretorios contem os arquivos
dessa aplicacao:
Client/
Contem robot_client.html
que e o cliente
servlet/
Contem RoboServlet.java
que e o programa em Java (servlet) a ser executado no servidor J2EE.
Esse
programa utiliza a classe HttpServletRequest para se comunicar com o
cliente
HTML. Por exemplo, para obter o conteudo do campo Acao do formulario,
ou seja,
movimento a ser realizado pelo braco robo, o programa utiliza: String
userAcao
= (String)request.getParameter("Acao");
O servlet tambem realiza a
conexao via sockets a maquina onde o robo esta conectado. Para isso e
preciso
informar o endereco IP da maquina remota e a porta a ser utilizada
(linhas 64 e
65):
String serverURL =
"200.17.91.157";
int porta = 5001;
Apos isso basta criar a nova
conexao socket (linha 73) e o stream de saida (linha 74):
try{
mySocket
= new Socket(serverURL,porta);
out
= new DataOutputStream(mySocket.getOutputStream());
in
= new DataInputStream(mySocket.getInputStream());
O envio da string via
sockets e realizado na linha 77:
out.writeUTF(userName + "#" + userAcao);
Caso a maquina remota esteja
desligada ou caso o servidor socket nao esteja em execucao naquela
maquina,
entao mensagens de erro sao fornecidas ao usuario (cliente HTML):
}catch (UnknownHostException e) {
outClient.println("<center><h2> ERRO: Nao
encontrou host: ... </h2></center>");
}catch (IOException e)
{
outClient.println("<center><h2>ERRO: Sem
conexao de I/O para: </h2></center>");
}
O arquivo HOW-TO-COMPILE-JAVAX.SERVLET.TXT
contem dicas de como compilar o programa
RobotSocketJNI/
Esse diretorio contem os
programas em C++ utilizados para acesso a porta serial no Linux (vide
descricao
de um dos modulos desse programa fornecida anteriormente): Robot.h,
Robot.cpp, RobotLinux.h, e RobotLinux.cpp. No programa em C++ RoboProxy.cpp,
sao informadas as funcoes (metodos) a serem utilizados poelo programa
em Java
(JNI), que no caso sao openSerial e sendCommand. Notar
a sintaxe
JNI utilizada nesse programa para a definicao das funcoes. O arquivo RobotProxy.h
e automaticamente gerado pelo compilador javah
a partir do RobotProxy.class
(gerado a partir do Robot Proxy.java).
O principal programa desse
diretorio e o RobotLinuxSocketserver.java. Essa classe
implementa o
servidor sockets, e possui tambem chamadas aos metodos nativos (JNI)
para envio
de comandos para o robo via porta serial. Notar o uso de robot do tipo RobotProxy para acesso as
funcoes em C++.
No main desse
programa e instanciado o objeto socket:
RobotLinuxSocketserver
socketServer = new RobotLinuxSocketserver();
O programa entra entao em um
laco infinito aguardando por mensagem na porta 5001 utilizada pelo
socket para
comunicacao com o socket no servidor J2EE. Ao receber uma string do
pela porta
5001, o programa extrai a acao a ser executada pelo braco robo, e envia
o
comando via chamada JNI para o programa em C++:
char resp =
socketServer.sendCommand(cmd);
O programa em C++ por sua
vez envia os comandos para o braco robo, utilizando o protocolo
definido pelo
programa em execucao no microcontrolador no modulo de controle do braco
robo:
envio de dois bytes. O primeiro byte sempre devera ser 0xc1, seguido
pelo byte
contendo o comando a ser realizado.
Para compilar o programa,
utilizar o usuario serial (do grupo uucp) e executar o Makefile:
make clean
make
Para executrar o servidor
socket na maquina onde se encontra o braco robo, sempre como usuario serial,
executar o Makefile:
make runServer
·
No
mesmo endereco estao tambem arquivos com
dicas de como realizar o deploy da aplicacao no servidor J2EE (deploytool_HOWTO.html),
e tambem o codigo fonte em perl (perl_cgi) para processamento do
formulario, caso nao tenha acesso a um servidor J2EE:
http://www.inf.pucrs.br/~eduardob/disciplinas/extensao/Robot/WebRobot/
·
Uma
alternativa ao J2EE seria a utilizacao do
Jboss (http://www.jboss.org), totalmente gratuito, que pode ser
executado
diretamente na maquina onde o braco robo se encontra. Nesse caso nao
seria
necessaria a comunicacao via sockets.
2. RS-232C
via rádio (wireless)
·
Nesta
placa temos a utilização de um módulo
transmissor e um receptor.
·
Componentes da placa:
o
Conector
DB9 (fêmea) utilizado para conectar na
porta serial do computador, no caso na porta COM0, nota-se que são
utilizador
apenas os pinos necessários ficando os outros pinos soltos.
o
MAX232
Circuito Integrado utilizado para
compatibilizar os níveis de tensão apresentados pela porta serial
(-12V/+12V)
com os níveis aceitos pelo transmissor e pelo receptor (+5 volts), a
alimentação do MAX232 deve ser de +5V;
o
Capacitores
são utilizados para permitirem o
funcionamento correto do MAX232 conforme é apresentado em seu manual,
existem
dispositivos com a mesma função e que possuem estas capacitores
internamente,
tornando o circuito mais compacto;
o
Power
é um conector que permite ligar as
tensões necessárias ao funcionamento do receptor, transmissor e do
MAX232;
o
Transmissor
é o dispositivo que recebe as
informações da serial de forma digital e envia para que os receptores
possam
utilizar os dados, o transmissor utilizado aqui é o TWS-433 que
trabalha com
tensões de 1,5 até 12V;
o
Receptor
é o dispositivo que recebe as
informações do transmissor e converte em sinais digitais os quais são
enviados
para a porta serial, o receptor utilizado é o RWS-433 que deve ter uma
tensão
de alimentação de +5V;
·
Para
realizar uma comunicação com envio e
recepção de dados cada um dos pontos deve ter um transmissor e um
receptor;
·
Para
adquirir um par transmissor e receptor são
necessários em torno de US$7.00 (Brasil/SP).
·
As
figuras a seguir mostram o diagrama de
blocos do circuito e o layout da placa.
3. Alguns links de interesse
·
Outra
opcao (alem da commapi) para comunicacao
serial em Java:
http://www.frii.com/~jarvi/rxtx/download.html
·
Dicas
para o desenvolvimento de aplicacoes para
USB, bem como classes gratuitas para Java e C++:
http://jusb.sourceforge.net/
·
Muita
informacao interessante:
http://www.beyondlogic.org/
·
Mais
informacao:
http://www.cera2.com/WebID/software/index.htm
RS-232
Interfacing
- Interfacing the
Serial Port - Parts 1 and 2
- Interfacing the
Serial Ports - Parts 3 and 4
- Quick & Light
RS-232 Terminal
- RS-232 Protocol
Analyser
Referencias
Bibliograficas Utilizadas
·
“PC Intern – The
Encyclopedia of System Programming”.
Michael Tisher and Bruno Jennrich. Ed. Abacus, 1996, 985 pp.
Partes
dessas notas de aula foram traduzidas diretamente desse livro.
·
“The Hardware Bible”. (Electronic Edition) Winn L.
Rosch. SAMs Publishing,
1997.
Partes
dessas notas de aula foram traduzidas diretamente desse livro.
·
Muito
material da internet!